Pose-NDF: Modeling Human Pose Manifolds with Neural Distance Fields
Garvita Tiwari1,2, Dimitrije Antic1, Jan Eric Lenssen2, Nikolaos Sarafianos3, Tony Tung3, Gerard Pons-Moll1,21 University of Tubingen, Germany 2 Max Planck Institute for Informatics, Saarland Informatics Campus, Germany 3Meta Reality Labs Research, Sausalito, USA
ECCV 2022
Overview
Abstract
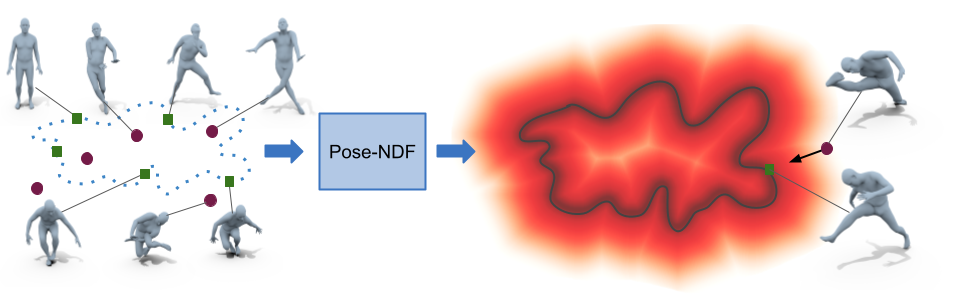
We present Pose-NDF, a continuous model for plausible human poses based on neural distance fields (NDFs). Pose or motion priors are important for generating realistic new poses and for reconstructing accurate poses from noisy or partial observations. Pose-NDF learns a manifold of plausible poses as the zero level set of a neural implicit function, extending the idea of modeling implicit surfaces in 3D to the high-dimensional domain SO(3)^K, where a human pose is defined by a single data point, represented by K quaternions. The resulting high-dimensional implicit function can be differentiated with respect to the input poses and thus can be used to project arbitrary poses onto the manifold by using gradient descent on the set of 3-dimensional hyperspheres. In contrast to previous VAE-based human pose priors, which transform the pose space into a Gaussian distribution, we model the actual pose manifold, preserving the distances between poses. We demonstrate that PoseNDF outperforms existing state-of-the-art methods as a prior in various downstream tasks, ranging from denoising real-world human mocap data, pose recovery from occluded data to 3D pose reconstruction from images. Furthermore, we show that it can be used to generate more diverse poses by random sampling and projection than VAE-based methods.
Pose Interpolation
3D Pose estimation from images
Motion Denoising
Citation
@inproceedings{tiwari22posendf,
title = {Pose-NDF: Modeling Human Pose Manifolds with Neural Distance Fields},
author = {Tiwari, Garvita and Antic, Dimitrije and Lenssen, Jan Eric and Sarafianos, Nikolaos and Tung, Tony and Pons-Moll, Gerard},
booktitle = {European Conference on Computer Vision ({ECCV})},
month = {October},
year = {2022},
}
Acknowledgments

Special thanks to the RVH team and reviewers, their feedback helped improve the manuscript and Andrey Davydov, for providing the code for GAN-based pose prior. This work is funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) - 409792180 (Emmy Noether Programme, project: Real Virtual Humans), German Federal Ministry of Education and Research (BMBF): T¨ubingen AI Center, FKZ: 01IS18039A and a Facebook research award. Gerard Pons-Moll is a member of the Machine Learning Cluster of Excellence, EXC number 2064/1 – Project number 390727645. The project was made possible by funding from the Carl Zeiss Foundation.