LoopReg: Self-supervised Learning of Implicit Surface Correspondences, Pose and Shape for 3D Human Mesh Registration
LoopReg pre-trained models and code
Bharat Lal Bhatnagar, Cristian Sminchisescu, Christian Theobalt and Gerard Pons-MollMax Planck Institute for Informatics, Saarland Informatics Campus, Germany
NeurIPS 2020 (Oral)
Abstract
We address the problem of fitting 3D human models to 3D scans of dressed humans. Classical methods optimize both the data-to-model correspondences and the human model parameters (pose and shape), but are reliable only when initialized close to the solution. Some methods initialize the optimization based on fully supervised correspondence predictors, which is not differentiable end-to-end, and can only process a single scan at a time. Our main contribution is LoopReg, an end-to-end learning framework to register a corpus of scans to a common 3D human model. The key idea is to create a self-supervised loop. A backward map, parameterized by a Neural Network, predicts the correspondence from every scan point to the surface of the human model. A forward map, parameterized by a human model, transforms the corresponding points back to the scan based on the model parameters (pose and shape), thus closing the loop. Formulating this closed loop is not straightforward because it is not trivial to force the output of the NN to be on the surface of the human model - outside this surface the human model is not even defined. To this end, we propose two key innovations. First, we define the canonical surface implicitly as the zero level set of a distance field in R3, which in contrast to morecommon UV parameterizations, does not require cutting the surface, does not have discontinuities, and does not induce distortion. Second, we diffuse the human model to the 3D domain R3. This allows to map the NN predictions forward,even when they slightly deviate from the zero level set. Results demonstrate that we can train LoopRegmainly self-supervised - following a supervised warm-start, the model becomes increasingly more accurate as additional unlabelled raw scans are processed. Our code and pre-trained models can be downloaded for research.
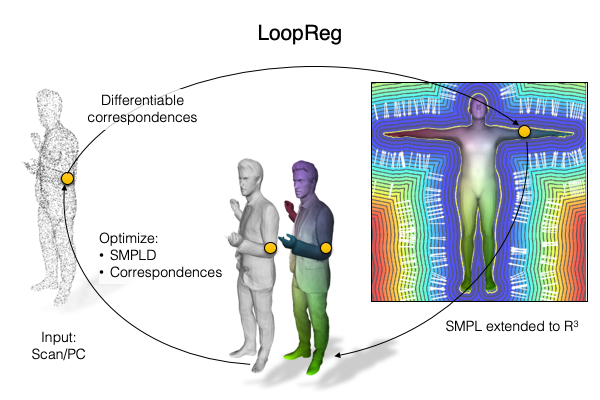 Overview: The input to our method is a scan or point cloud. For each input scan point our network predicts a correspondence to a canonical model in R3. We use these correspondences to jointly optimize the parametric model and CorrNet under self-supervised training.
Overview: The input to our method is a scan or point cloud. For each input scan point our network predicts a correspondence to a canonical model in R3. We use these correspondences to jointly optimize the parametric model and CorrNet under self-supervised training.
Citation
@inproceedings{bhatnagar2020loopreg,
title = {LoopReg: Self-supervised Learning of Implicit Surface Correspondences, Pose and Shape for 3D Human Mesh Registration},
author = {Bhatnagar, Bharat Lal and Sminchisescu, Cristian and Theobalt, Christian and Pons-Moll, Gerard},
booktitle = {Advances in Neural Information Processing Systems ({NeurIPS})},
month = {December},
year = {2020},
}